>>>
Eine Laufschrift
läuft über das Display bis entweder ein Sensor eine Bewegung
entdeckt oder eine bestimmte Zeitspanne verstreicht. Danach läuft
der Flocking-Algorithmus ab. Werden die Agenten gestört, so fliehen
sie an den Rand und verharren dort noch einige Zeit. Werden die Agenten
eine bestimmte Zeit nicht gestört, so erreichen sie den Balz-Modus.
Sie umkreisen einen Punkt, zufällig verschwindet einer der vier
Agenten, dafür wird ein neuer Agent hinzugefügt. Dieser
Agent gibt jetzt die Richtung für die Bewegung an. Bei der normalen
Bewegung sind die Agenten in Formation, kleine Variationen sind jedoch
gewollt solange keiner der Agenten zu nahe oder zu weit weg ist. Die
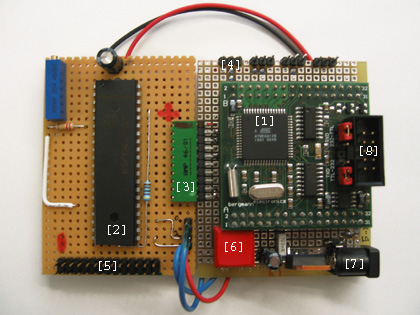
Software wurde in Assembler geschrieben und in sinnvolle Module eingeteilt,
z.B. SPI, EEPROM, LED. Die Abfrage der Sensoren erfolgt periodisch
im Interrupt, wobei der Mittelwert gebildet wird. Desweiteren verwaltet
die Interrupt-Service-Routine diverse Timer, die die zeitlichen Abläufe
steuern.